- 2019.01.19
- makecode
Windows10用のMakecodeの紹介
当サイトでは、Micro:bitのプログラム作成用のMakecodeを紹介していますが、ウエブ版だけでなくWindows用も準備されています。拡張機能や共有機能を使わなければ、ネットワーク接続無しでも使えますのでお子様用に使うのも良いかもしれません。 導入手順(Windows10にて検証) 1.こちらにアクセスすると以 […]
当サイトでは、Micro:bitのプログラム作成用のMakecodeを紹介していますが、ウエブ版だけでなくWindows用も準備されています。拡張機能や共有機能を使わなければ、ネットワーク接続無しでも使えますのでお子様用に使うのも良いかもしれません。 導入手順(Windows10にて検証) 1.こちらにアクセスすると以 […]
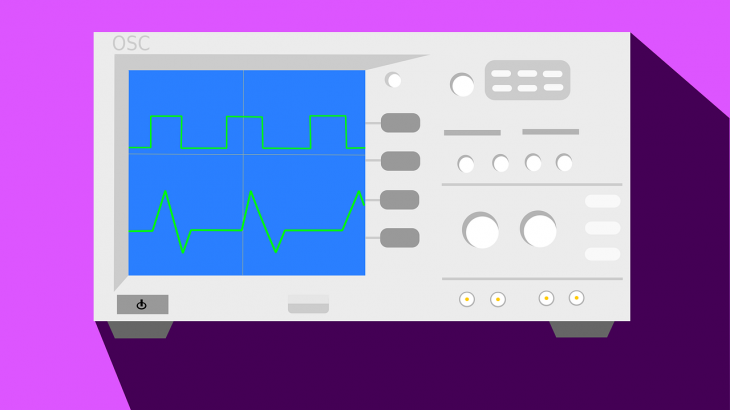
Micro:bit、Arduinoなどで色々な回路を作ってテストすることが多いのですが、テスターだけでは確認できないデジタル信号があります。『会社で使ったオシロスコープがあれば・・・』と思う事が増えましたので、探してみました。 購入した機器 Amazonで『オシロスコープ』で検索すると数千円~10万円で買えるではありま […]
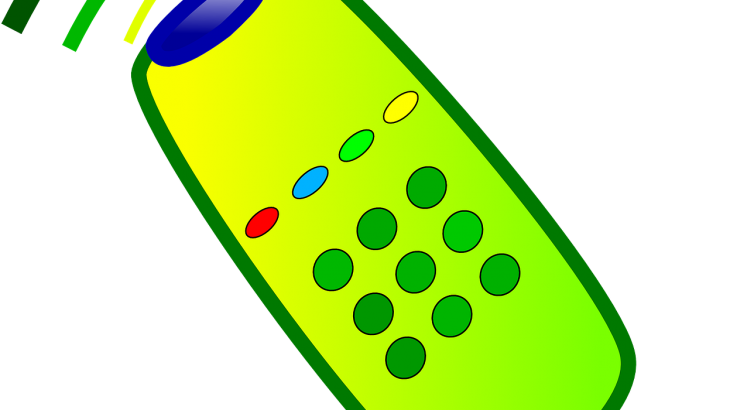
マイクロビット(Micro:bit)でロボットカーを作る準備として、赤外線受信モジュールを接続して、赤外線リモコンから信号を受信する方法を紹介します。 赤外線受信モジュールと赤外線リモコンについて 仕様(手持ちのELEGOO製品) 1.赤外線受信モジュール 基板上に立っている金属でカバーされた黒い部分が、リモコンからの […]
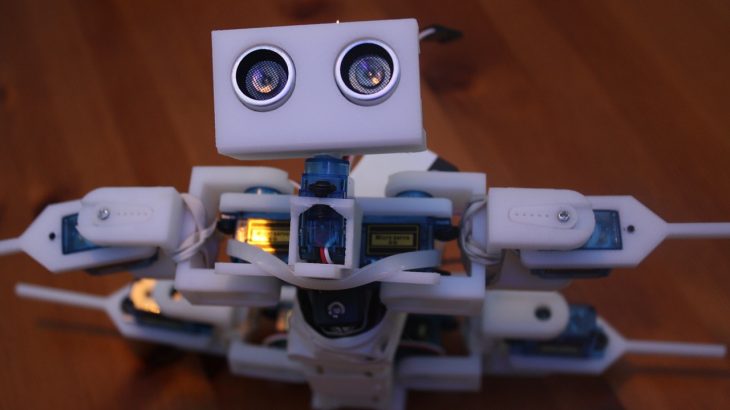
マイクロビット(Micro:bit)で障害物を避けるロボットカーを作るには、超音波距離センサーで障害物までの距離を測る必要があります。ロボットカーを作る準備として、今回はMicro:bitと距離センサーの接続の仕方を紹介します。 HC-SR04とは 仕様 1.外形 左側の丸い所から超音波を送信して右側で受信します。送信 […]
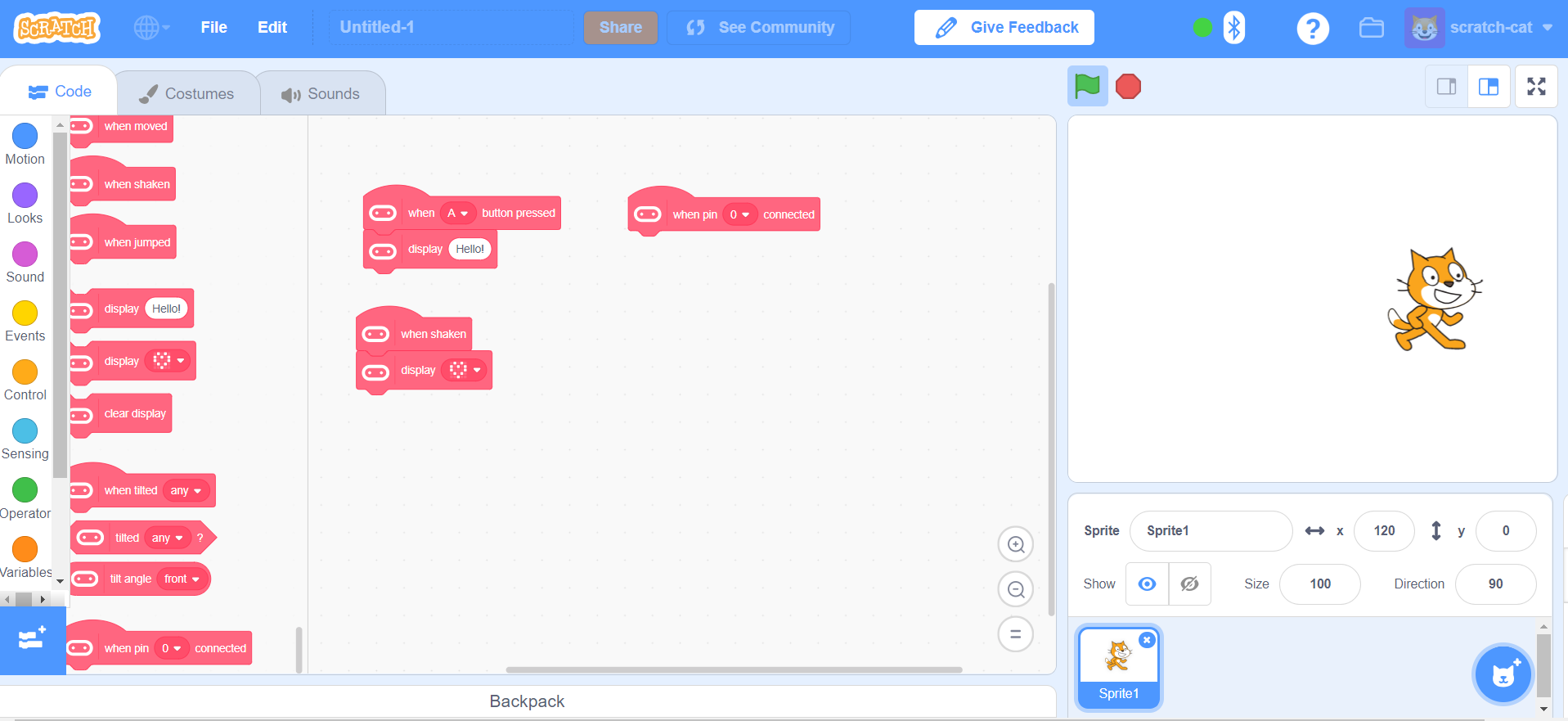
2019/1/2にリリースされた最新のScratch3にMicro:bit用の拡張機能が追加されていますのでWindows10 での手順を紹介します。日本語化もされています。Micro:bitからスクラッチのキャラクターを動かしたり、スクラッチからマイクロビットにメッセージを表示したりできます。当サイトで […]
Scratchには、現在V1.4、V2.0、V3.0がありますが、それぞれ外部デバイスと接続する仕組みが準備されています。今回はV2.0オフラインエディターとArduino(アルデュイーノ)との接続について紹介します。 Scratch2.0にはHTTPで通信する仕組みが組み込まれています。この仕組みを利用するにはHTT […]
Scratchには、現在V1.4、V2.0、V3.0(ベータ版)がありますが、それぞれ外部デバイスと接続する仕組みが準備されています。今回はV2.0オフラインエディターとMicro:bit(マイクロビット)との接続について紹介します。 Scratch2.0にはHTTPで通信する仕組みが組み込まれています。この仕組みを利 […]
Scratchには、現在V1.4、V2.0、V3.0がありますが、それぞれ外部デバイスと接続する仕組みが準備されています。今回はV2.0オフラインエディターとアンドロイドアプリとの接続について紹介します。 Scratch2.0にはHTTPで通信する仕組みが組み込まれています。この仕組みを利用するにはHTTPサーバーを同 […]
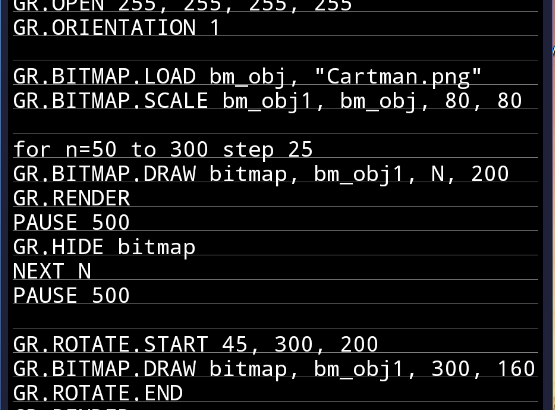
当サイトで紹介して、私が日本語化したアンドロイドアプリBASIC!のマニュアルの日本語版です。今回はグラフィックス命令(その3)についてです。尚、原文をそのまま訳すのでは無く、分かりやすく変更したり、実例の追加などをしていきます。 BASIC!MLの詳しい導入手順と初めての使い方はこちらの記事を参照してください。英語版 […]
Scratchには、現在V1.4、V2.0、V3.0がありますが、それぞれ外部デバイスと接続する仕組みが準備されています。今更ですが、今回はV1.4オフラインエディターについて紹介します。 Scratch1.4にはRemote Sensors Protocolが組み込まれています。この機能により、外部の機器とTCP/I […]