マイクロビット(Micro:bit)でロボットカーを作る準備として、ステッピングモーターを接続して動かしてみました。ロボットカーでどう使うかまだ考え中です。
ステッピングモーターとは(サーボモーターとの違い)
ステッピングモーター:入力パルス数に比例して正確な回転をさせることができます。1パルス毎に一定の角度(例:0.72度)回転します。サーボモーターのように回転角の制限はありません。低速域でのトルクが大きいという特徴があります。サーボモーターのように回転検出はありません(最近は回転検出付きもあるようです)。
サーボモーター:回転検出(当サイトで紹介済みのSG90は抵抗値)機能を持っており、モータ軸の回転位置/回転速度をドライバにフィードバックする仕組みを持ちます。入力パルス幅によって回転角度が変わり、SG-90の場合は-90度から+90度の180度が回転角です。ステッピングモーターに比較して高速な位置決めが可能です。
今回使用した製品仕様
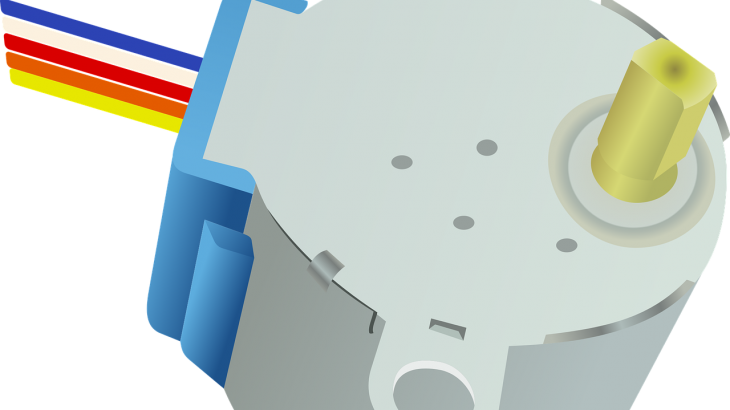
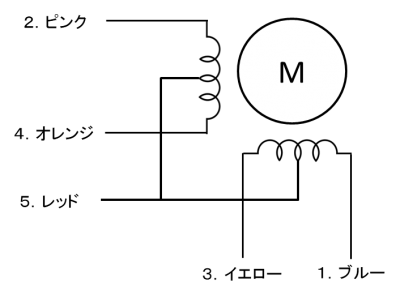
1.ステッピングモーター 28BYJ-48 仕様
外観
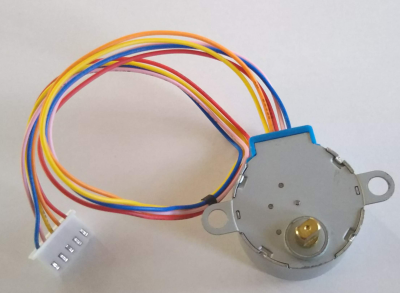
モータータイプ:ユニポーラ型
定格電圧:5- 12VDC
ギア比:1/64
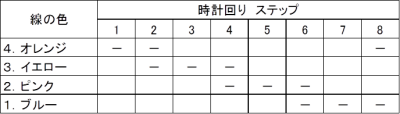
ハーフステップモード(推奨):8ステップで5.625度 x 64で内部モーター1回転
フルステップモード:4ステップで11.25度 x 32で内部モーター1回転
こちらの記事を参考にしました。
2.ULN2003 ドライバーボード
Micro:bitから直接モーターを動かすことはできませんので、このドライバーボードからモーターへ定格電圧5Vのステップパルスを入力します。
外観
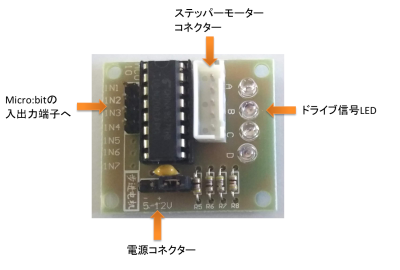
詳しくはこちらを参照してください。
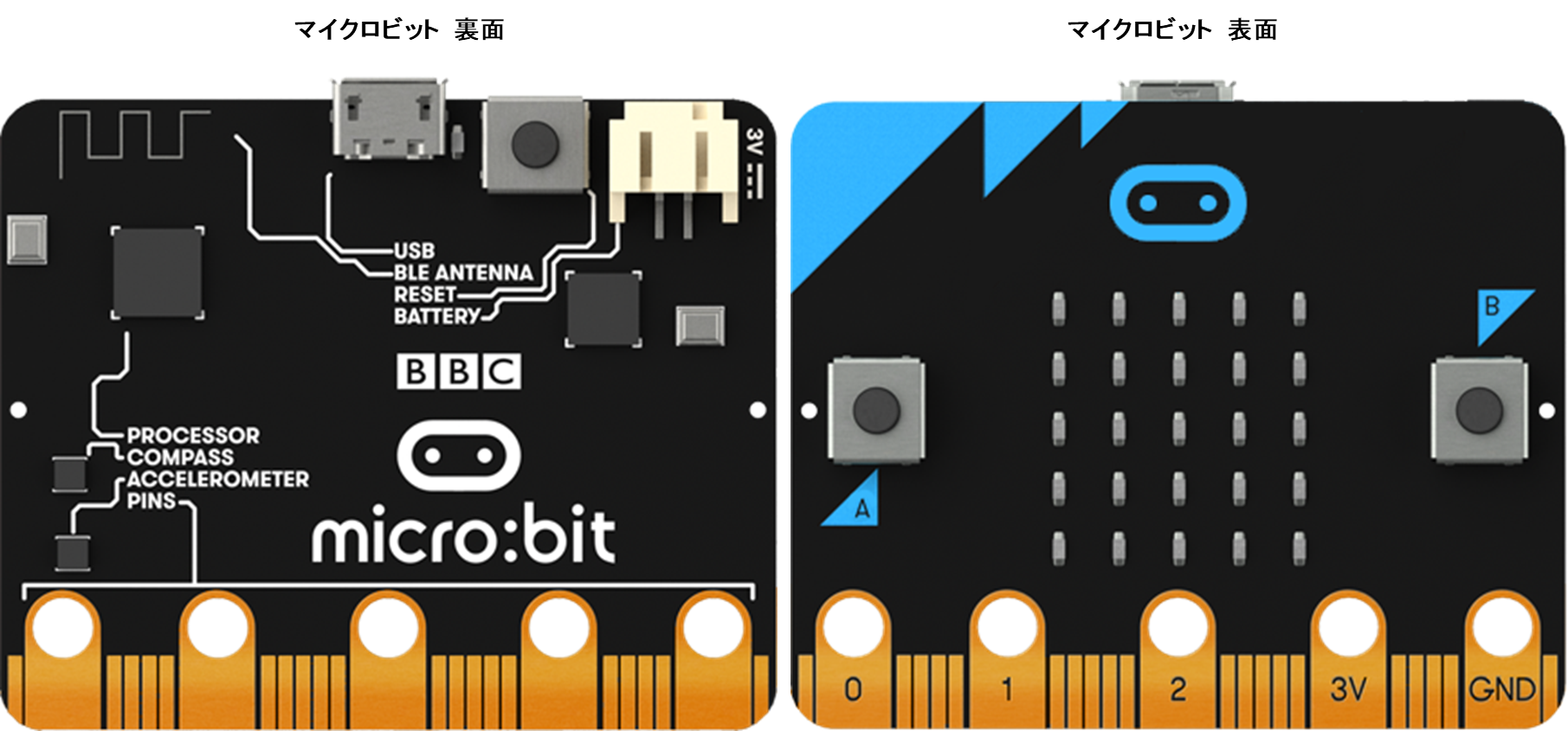
マイクロビットとステッピングモーター/ドライバーボードの接続
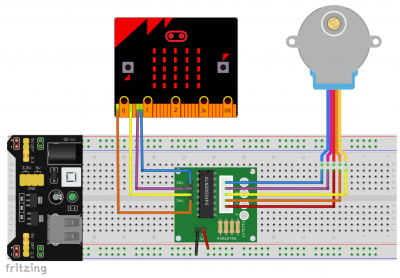
配線
Micro:bit Pin3 ーーー ドライバーボード In4
Micro:bit Pin4 ーーー ドライバーボード In3
Micro:bit Pin6 ーーー ドライバーボード In2
Micro:bit Pin7 ーーー ドライバーボード In1
+5V ーーーーーーードライバーボード +
Gnd ーーーーーーー ライバーボード –
ステッピングモーター ーーードライバーボードステッパーコネクター
MakeCodeでプログラムする
以下、ステッピングモーターがAボタンを押している間時計回りに回転し、Bボタンを押している間反時計回りに回転するプログラム例です。
実行結果について
以下のように、Aキーを押すと時計回りに回転、Bボタンを押すと反時計回りに回転します。
使用した部品
単品
最後まで記事をお読みいただきありがとうございます。
記事の改善に役立てたいと思いますので、よろしければアンケートにご協力ください。